Hallo zusammen,
ich möchte heute mein erstes Mikromodell vorstellen, ein THW - Mercedes Benz Zetros. Das Ursprungsmodell kommt von herpa.
Neben dem Aussehen war auch der Platz im Modell ein Argument für mich. Es ist mein erstes und ich hab es noch nicht so mit den winzigsten Fitzeligkeiten. Unter der Plane sieht es dann ja keiner.
Nachdem ich schon ziemlich lange die Idee eines Mikromodells mit mir herumtrage, habe ich anfang letzten Jahres mit dem Projekt begonnen:
- Herpa Mercedes Benz Zetros
- passendes Fast-Build-Chassis von mikromodellbau.de
- Deltang Rx45b
- LEDs für die üblichen Funktionen, leider aber kein THW-Blinklicht.
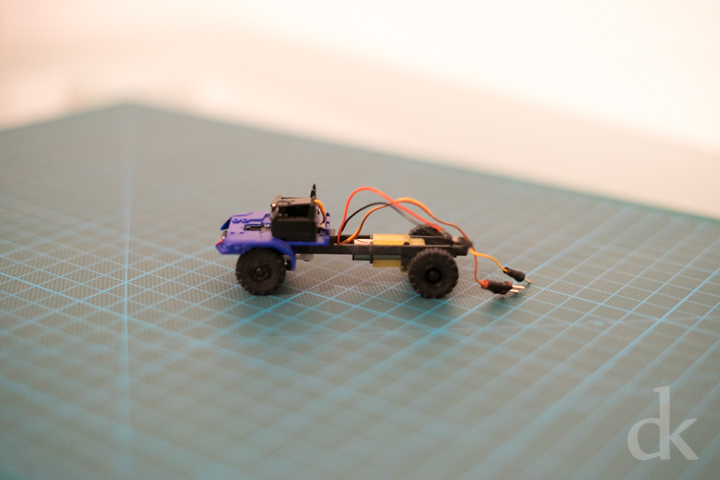
An der Chassis waren viele kleine Arbeiten notwendig, damit der Zetros passt. Z.B. würde der Servo durch die Motorhaube schauen, jetzt sitzt er passend im Fahrerhaus.
Damit die Vorderachse nicht zu stark pendelt, sind zwei kleine Stückchen Schrumpfschlauch als "Federung" verbaut. Der Wendekreis ist allerdings nahe dem eines Flugzeugträgers.
Ich wollte, dass das Originalmodell so gut wie möglich erhalten bleibt (insbesondere die Kotflügel), das ist mir denke ich auch gelungen.
Auch die Anbauten sind wieder weitgehend die von herpa, damit das Modell originaler aussieht. Durch die geänderten Kotflügel hinten passt das Ersatzrad nun nicht mehr. Gibt schlimmeres.
Deltang-Empfänger sind praktisch, die sprechen nämlich das gleiche Protokoll wie meine Hubschrauberfernbedienung.
Aber irgendwie war der bloße Umbau des Zetros doch zu langweilig, also habe ich noch eine Fernbedienung gebaut:
- Teensy 3.2 Mikrocontroller (Arduino-programmierbar)
- Deltang Tx2V
- zwei Joysticks und ein paar Kleinteile
- drei digitale Potentiometer, die sich um die Übersetzung Teensy -> Deltang kümmern
Die Fernbedienung hat drei Modi:
1) Standard Vier-Kanal
2) Gas/Bremse + Lenkung auf den Sticks, Blinker, Licht und Warnblinker als Knöpfe
3) Wie 2 aber mit einem realtiätsnahem Fahrzeugmodell:
- 8100kg Fahrzeugmasse, 1300Nm Motor (man könnte glatt meinen, es sei ein Elektromotor verbaut) und dazu einfache Formeln, die Traktions- und Widerstandskräfte simulieren.
- Drei Gänge D, P und R direkt schaltbar. D.h. Gas ist immer linker Stick nach oben, bei R fährt man eben rückwärts.
Damit ergibt sich ein realistischerer Fahreindruck.
Das Gehäuse der Fernbedienung ist gelasertes Holz, passt alles super zusammen.
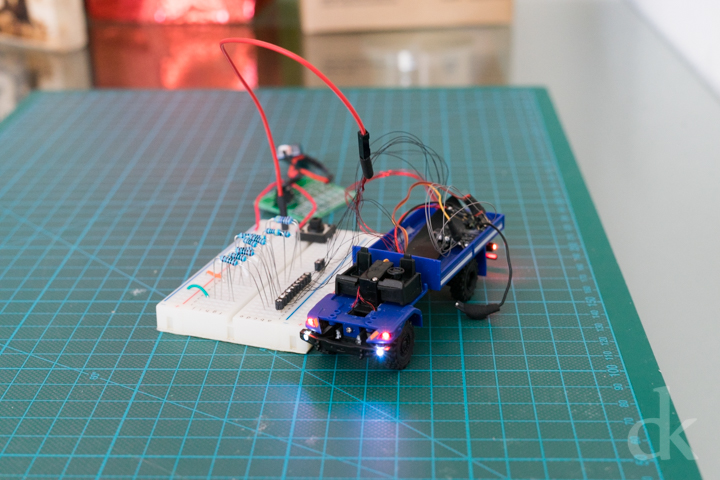
Die Aussparungen in der Fernbedieungsplatine (für den Tx2, den 9V-Block sowie die Joysticks) habe ich dann gleich genutzt, um für meinen Zetros eine kleine Platine für die Stromversorgung und die LED-Transistoren sowie -Widerstände zu bauen.
Da ich mir noch nicht sicher war, ob die LEDs nicht zu viel Strom über den Rx ziehen, wollte ich es mal damit probieren.
Für mein erstes Bastel + Elektronik-Projekt finde ich das alles ganz gut gelungen.
Die Pläne und das Arduino-Codefile zum Nachbauen findet ihr auf github:
https://github.com/danie1kr/zetros_1-87Wer Interesse an den Platinen hat, ich habe noch einige über.
Lessons learned:
- Man muss halt auch irgendwann mal was festkleben. ;)
- Pins bzw. Pfostenstecker sind ziemlich hoch.
- Zu nah an einem PIN und der Groundplate sägen, macht Kurzschlüsse.
- Wenn man eine MicroUSB-Buchse suchst, verstecken sich in den Suchergebnissen auch MiniUSB-Buchsen.
Das nächste große Projekt ist auch schon in Planung. Dafür wird aber erst mal ein Versuchsfahrzeug nötig, um etwas zu proben... Bleiben Sie dran!
Viele Grüße
Daniel
 Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
 Mikromodell-Chat
Mikromodell-Chat
 6
6


 15.05.2019 20:37
15.05.2019 20:37